30 Jun

(Credit : Indian LifeHacker)
Hello,
In this tutorial, we are going to learn how to make Line follower robot using Arduino Uno which will follow the black line.
Hardware Required :
Software Required :
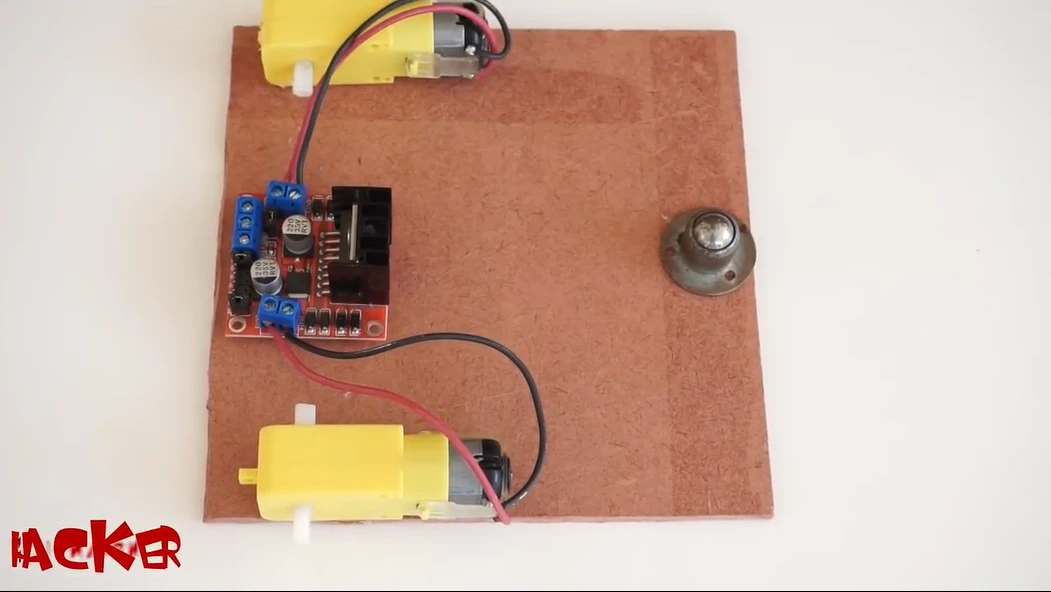
Step: 1
- Stick two motors on cardboard as shown in the image.
- Stick L298N Motor Driver between two motors.
- Join the connection between L298N Motor Driver and Motors.
- Stick castor ball wheel on cardboard as shown.
- Fix the wheels.
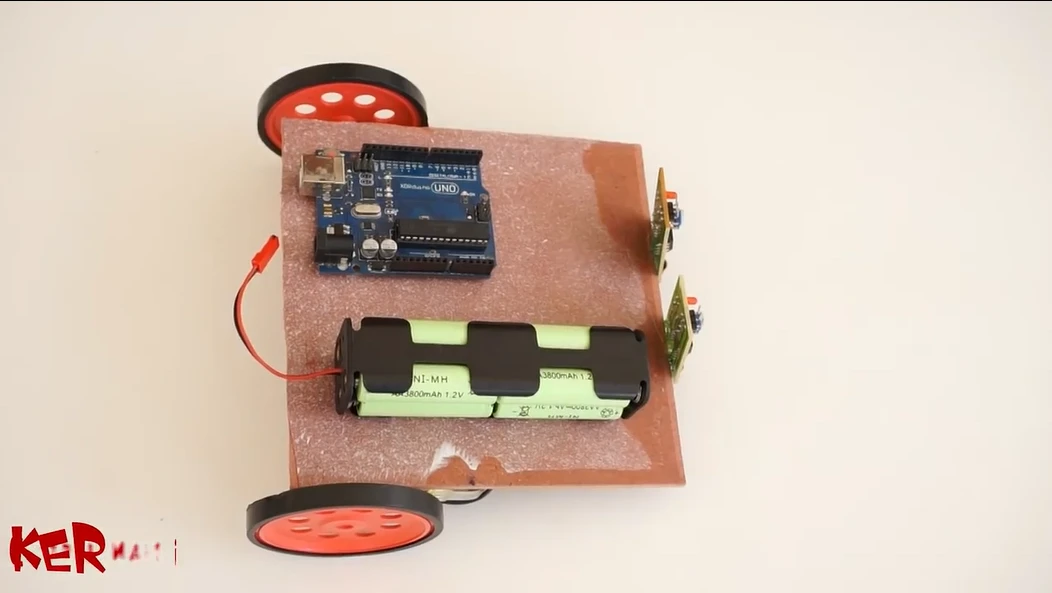
Step: 2
- Stick the Arduino UNO and battery on another side of cardboard.
- Stick IR proximity sensor slightly up from the ground as shown.
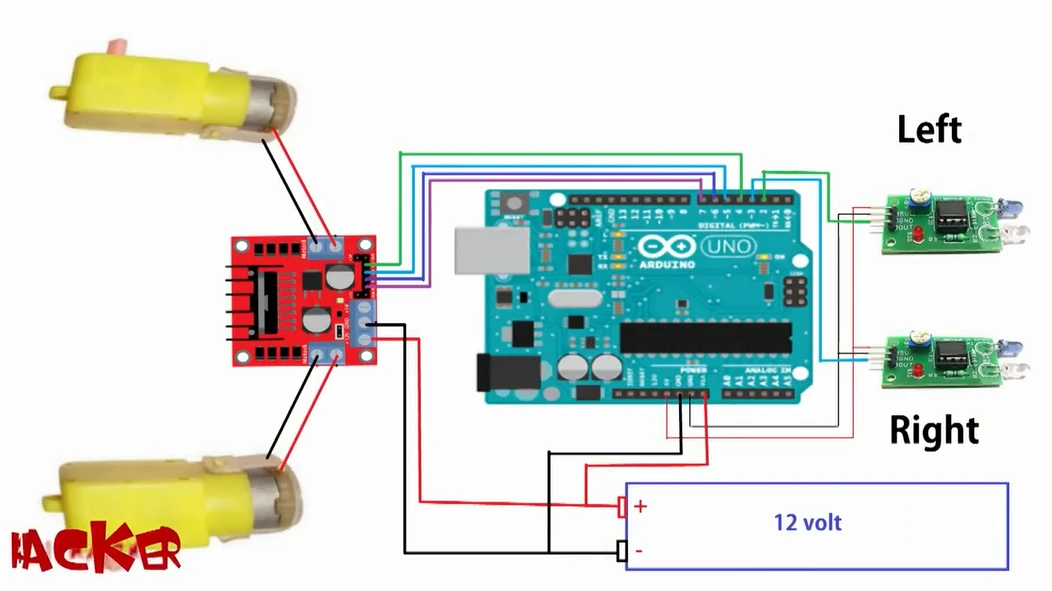
Step: 3
- Connect the IR proximity sensor to Arduino UNO as shown.
- Connect the Arduino UNO to the L298N Motor Driver.
- At last, connect the battery to Arduino UNO.
Step: 4
-
Connect the Arduino UNO to the computer to upload the codes by using Arduino IDE.
-
Download the code: Click Here
- Now Your Robot is ready to follow the black line.

Hot
-59 %
The Arduino Uno R3 Compatible board is an electronic hardware device used to build and program electronic circuits and projects. The board is based on..
₹528 ₹1,299

-13 %
L298N 2A Based Motor Driver is a high power motor driver perfect for driving DC Motors and Stepper Motors.
It uses the popular L298 motor driver IC..
₹143 ₹164

-6 %
Plastic Tire Wheel With DC 3-6v Gear Motor For Arduino Smart Car
Specifications:
Motor:
Voltage: DC 3V-6V
Current: 100 MA-120MA
Reduct..
₹93 ₹99

-59 %
The sensor module light is adaptable to the environment, with a working voltage of 3.3 V to 5 V. It has a pair of infrared transmitting and receiving ..
₹28 ₹69

Castor Wheel is omnidirectional wheel. which is generally use when Robot or car need to sharp turn.
Specification:
Base plate Dia. 34 mm
..
₹38

2 Comment(s)
Kindly upload the code of LFR.
Main aurdino Mein program kahan se dalwa sakta hun
Leave a Comment