28 Jan

Hardware Required
- Quadcopter Drone Combo Kit: Buy Now
Step1: Drone assembly

- These are many types of frames for Drone. They are made of Fiber & has integrated PCB for soldering ESC and battery wires.
- The drone which has four arms.
- This kit is a very useful and affordable kit.
Step 2: Motor
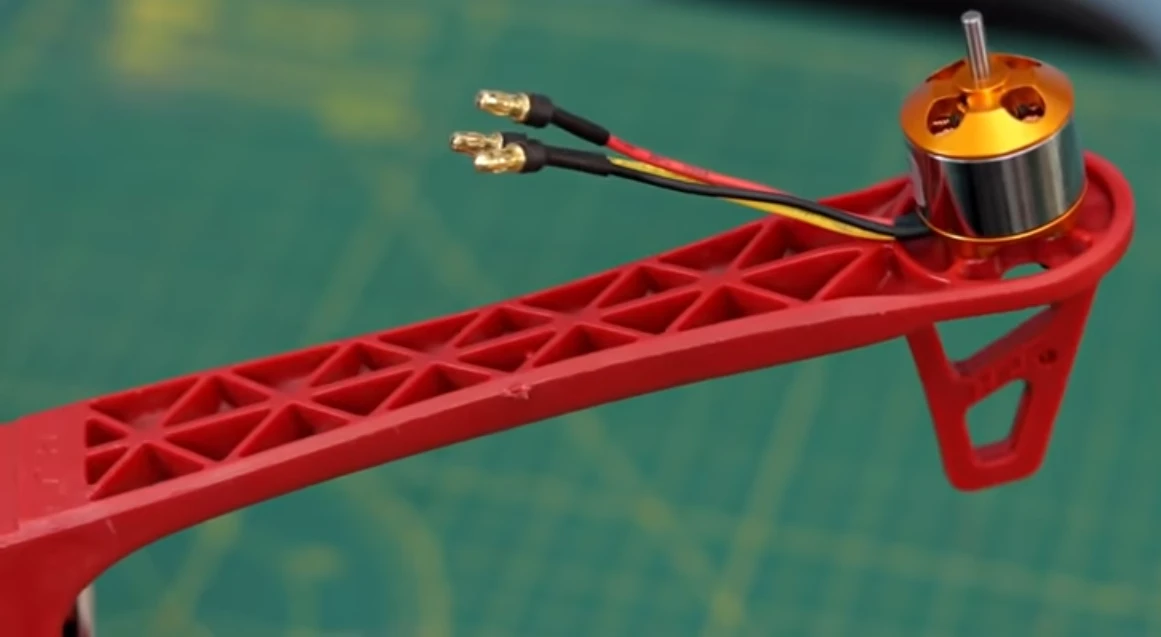
- These motors and ESC now come with bullet connectors and so you can easily connect (and disconnect) them.
- This may be essential as you must connect the motors cables to the ESC cables in a specific way to ensure they spin in the correct direction 372.
Step 3: ESC

- The correct method of connection is shown below.
- an electronic speed controller is an electronic device used to control the speed of the motor and the direction also.
- It follows a speed reference signal and varies the switching rate of field-effect transistors.
- By adjusting the duty cycle or switching the frequencies of the transistor the speed can be changed
Step4: KK 2.1.5 Flight Control
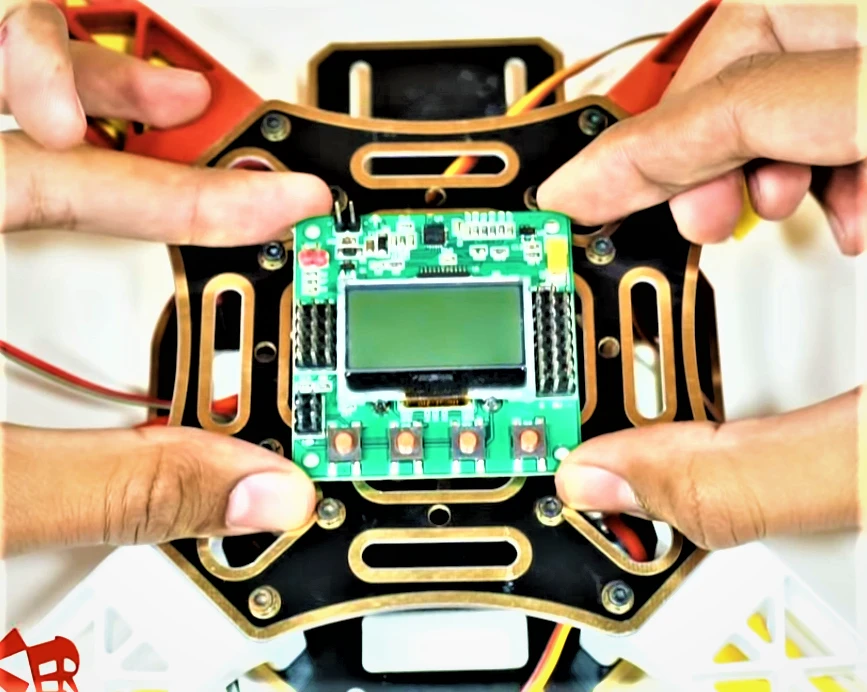
- your connections are all good you should see the LCD screen on the board lit up.
- KK2.1 Multi-Rotor controller manages the flight of multi-rotor Aircraft
- Its purpose is to stabilize the aircraft during flight and to do this, it takes signals from onboard gyroscopes (roll, pitch, and yaw)
- You can use the supplied antistatic foam container as a form of protective case for the Flight Controller on the craft.
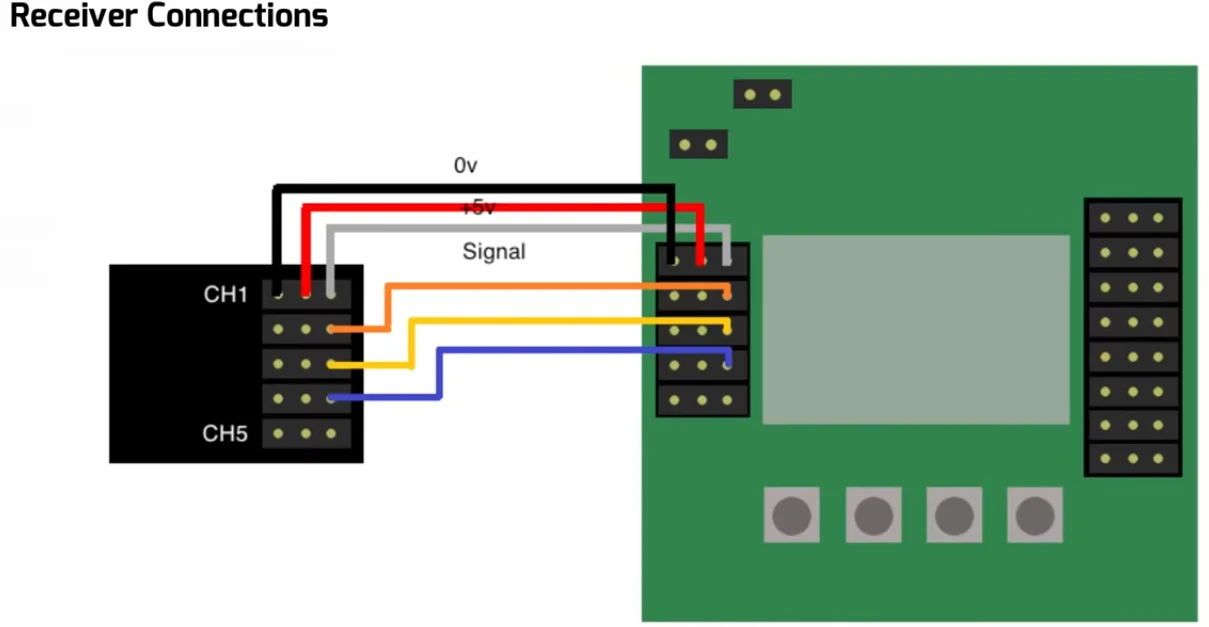
Step 5: Receiver diagram
Step 6: Propeller Installation
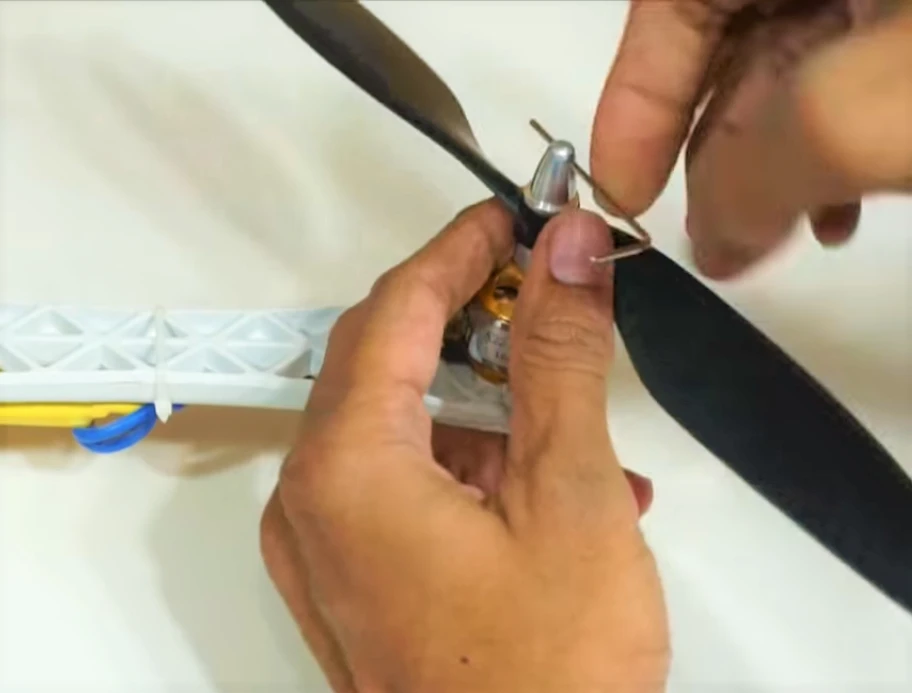
- You just need to be aware that there are two different types of propellers; counter-clockwise (CCW) and clockwise (CW) spinning ones.
- You, therefore, need to attach the correct props to the correct motors.
- Join the propeller with the motor and fit the propeller tite.
Step 7:Remote

- It is a radio communicating wireless control system.
- The signal from the transmitter is received by the receiver placed on the frame of Drone through the antenna in a receiver.
- The signal from a receiver is given to the KK board.
- This board will send the signal to all electronic speed controller from that speed of the motor is controlled by the transmitter.
 - FlyRobo")
Hot
-12 %
This quadcopter combo drone kit is a complete bundle for making a basic quadcopter, It includes everything to make and fly your own quadcopter. The fl..
₹11,499 ₹12,999

Leave a Comment